The Millibot Project - research effort by Carnegie Mellon University (
CMU), under the direction of
Dr Pradeep Khosla, funded by Defense Advanced Research Projects Agency (
DARPA).
These mini robots each has their own specific functions, and they are capable of collaborating to work for a bigger objective. These are pioneer prototypes of future unmanned war systems.
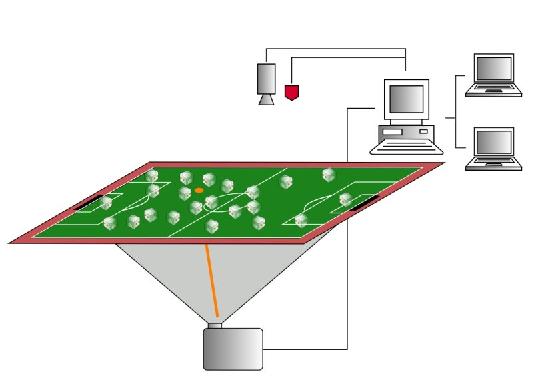
Imagine a swam of these robots going into unknown enemy grounds while human operators sit back in safe zone monitoring the situation as if they are playing an arcade game.
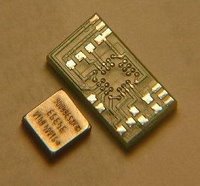
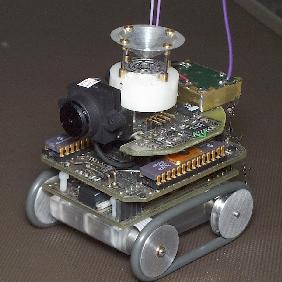
To let you have a feel of the size of these robots, here is a picture to let you compare it with a standard 9V rectangular battery.
Because it's small in size, it is possible to deploy a huge swam of them into an objective area. If a few of them "dies", it's ok. There are still a whole lot of them who are able to do the job.
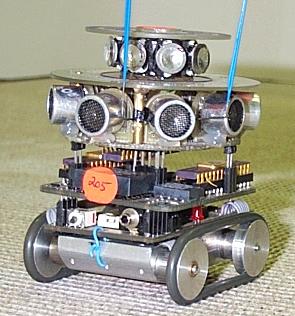
The Sonar Robot.
It has a 8-element sonar array that is used to detect obstacles and produce maps. It is also capable of coordinating with other robots to perform robot to robot ranging, so as to keep track of team member location as the team moves.

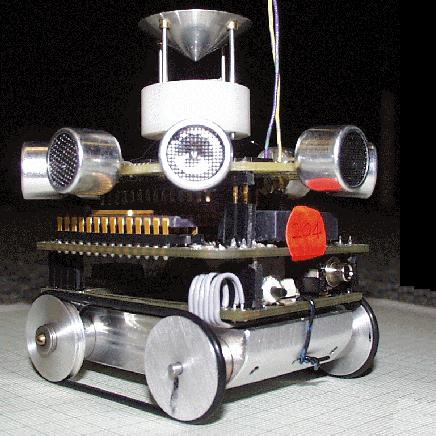
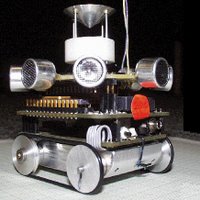
The Long Range Sonar Robot.
It has a 8-element sonar array just like the short range module, but has some major improvements. It is also capable of robot to robot ranging and perform
localization.
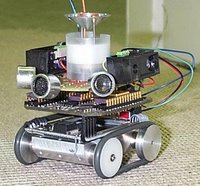
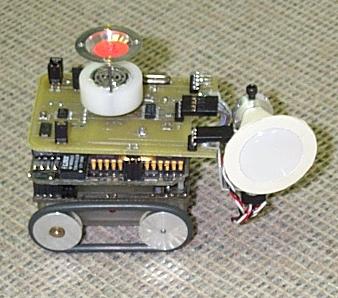
The Digital Infrared Ranging Sensor (Dirrs) Robot.
It has 2 Dirrs modules on either side and is used mainly to follow walls and search for openings. It also has 3 sonar elements infront.

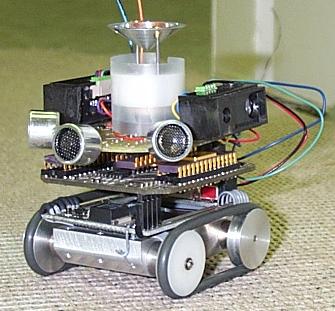
The Pyro Robot.
It has a sweeping pyro detector on the front that allows the robot to sweep the area for heat sources. It is sensitive enough to detect stationary warm bodies
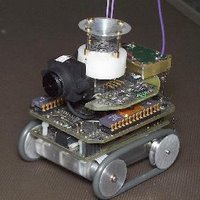
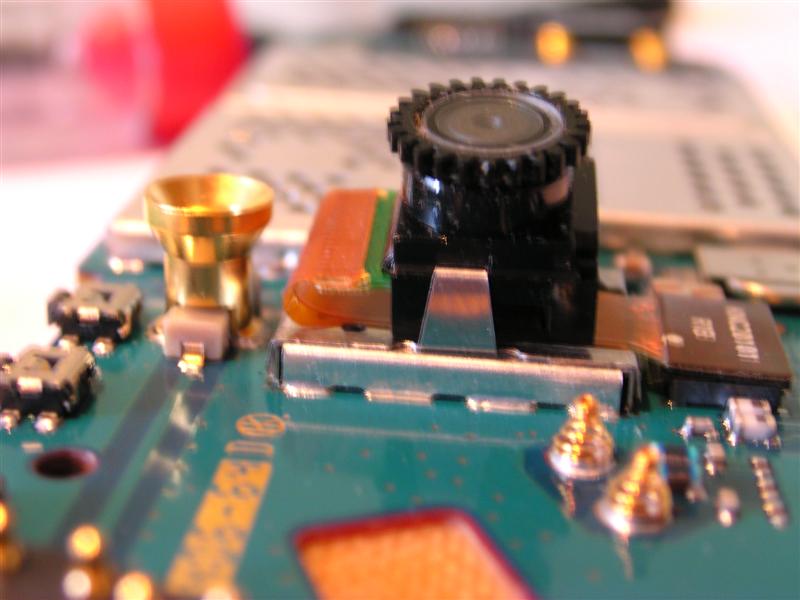
The Color Camera Robot.
It has a small Color camera. This allows remote commander to peep at what is happening in that area of operation.
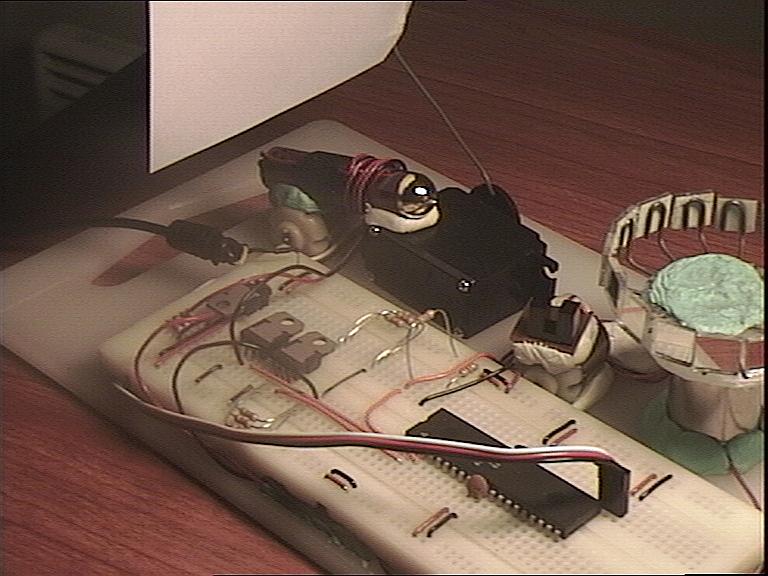
This is a MUST SEE video: Interview with Pradeep about the future of Millibot deployment. He talks about why are they looking at millibots, and he takes apart one immediately!
LINK
This is a local media news coverage for millibots. Another MUST SEE!
LINKSome good Papers from this Project:
- Grabowski, R., Khosla, P., "Localization Techniques for a Team of Small Robots" in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'01), Maui, Hawaii, October 29-November 3, 2001.
- L.E. Navarro-Serment, R. Grabowski, C.J.J. Paredis, P.K. Khosla, "Modularity in Small Distributed Robots" in Proceedings of the SPIE conference on Sensor Fusion and Decentralized Control in Robotic Systems II, Boston, MA, September 19-22, 1999.
How about making a couple of them to roam around your house? ;p